




අල්ට්රා සංයුක්ත DP-IQ මොඩියුලේටර් පක්ෂග්රාහී පාලකය ස්වයංක්රීය පක්ෂග්රාහී පාලකය


විශේෂාංගය
• ද්විත්ව ධ්රැවීකරණ IQ මොඩියුලේටර් සඳහා ස්වයංක්රීය නැඹුරු වෝල්ටීයතා හයක් එකවර සපයයි.
මොඩියුලේෂන් ආකෘතිය ස්වාධීන:
SSB, QPSK, QAM, OFDM සත්යාපනය කර ඇත.
• ප්ලග් සහ ප්ලේ:
අතින් ක්රමාංකනය අවශ්ය නොවේ සියල්ල ස්වයංක්රීයයි
•I, Q අත්: උච්ච සහ ශුන්ය මාතයන් පාලනය කිරීම ඉහළ වඳවීමේ අනුපාතය: 50dB උපරිම1
•P අත: Q+ සහ Q- මාතයන් මත පාලනය නිරවද්යතාවය: ± 2◦
• අඩු පැතිකඩ: 40mm(W) × 29mm(D) × 8mm(H)
•ඉහළ ස්ථායිතාව: සම්පූර්ණයෙන්ම ඩිජිටල් ක්රියාත්මක කිරීම භාවිතා කිරීමට පහසුය:
• කුඩා ජම්පර් 2 සමඟ අතින් ක්රියා කිරීම
UART /IO හරහා නම්යශීලී OEM මෙහෙයුම්
• පක්ෂග්රාහී වෝල්ටීයතා සැපයීම සඳහා ක්රම දෙකක්: a. ස්වයංක්රීය පක්ෂග්රාහී පාලනය b. පරිශීලක නිර්වචනය කළ පක්ෂග්රාහී වෝල්ටීයතාවය

අයදුම්පත
•LiNbO3 සහ අනෙකුත් DP-IQ මොඩියුලේටර්
•සංයුක්ත සම්ප්රේෂණය
1ඉහළම වඳවීමේ අනුපාතය පද්ධති මොඩියුලේටරයේ උපරිම වඳවීමේ අනුපාතය මත රඳා පවතින අතර එය 1 නොඉක්මවිය යුතුය.
2UART ක්රියාකාරිත්වය ලබා ගත හැක්කේ පාලකයේ සමහර අනුවාදයන් මත පමණි.
කාර්ය සාධනය
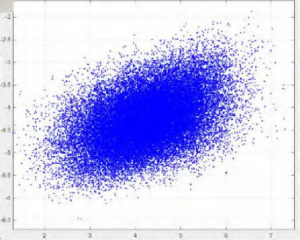
රූපය 1. තාරකා මණ්ඩලය (පාලකය නොමැතිව)
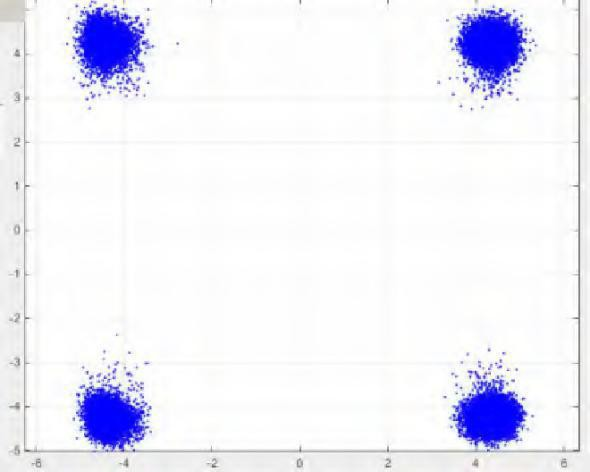
රූපය 2. QPSK තාරකා මණ්ඩලය (පාලකය සමඟ)
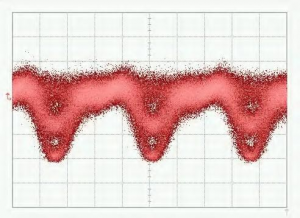
රූපය 3. QPSK-ඇස් රටාව
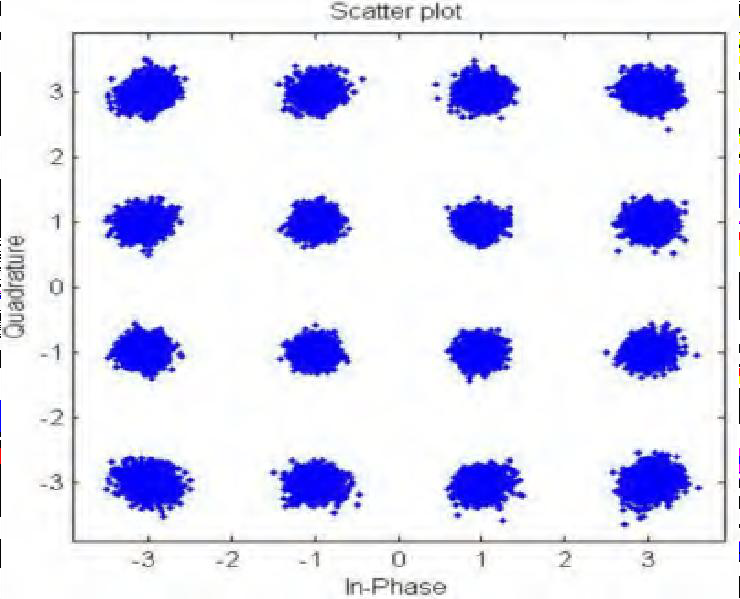
රූපය 5. 16-QAM තාරකා මණ්ඩල රටාව
රූපය 4. QPSK වර්ණාවලිය

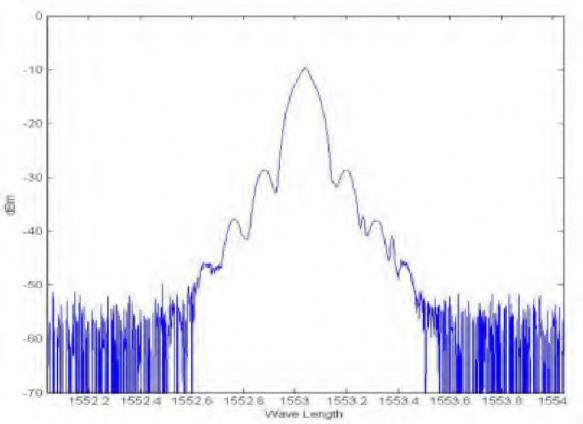
රූපය 6. CS-SSB වර්ණාවලිය
පිරිවිතර
| පරාමිතිය | අවම | ටයිප් කරන්න | උපරිම | ඒකකය |
| පාලන කාර්ය සාධනය | ||||
| I, Q අත් පාලනය කරනු ලබන්නේශුන්ය (අවම)or උපරිම (උපරිම)ලක්ෂ්යය | ||||
| වඳවීමේ අනුපාතය | මර්1 | 50 | dB | |
| P අත පාලනය කර ඇතQ+(දකුණු චතුරස්රය)or Q-( වම් චතුරස්රය)ලක්ෂ්යය | ||||
| Quad හි නිරවද්යතාවය | −2 | +2 | උපාධිය2 | |
| ස්ථායීකරණ කාලය | 45 | 50 | 55 | s |
| විදුලි | ||||
| ධනාත්මක බල වෝල්ටීයතාවය | +14.5 | +15 | +15.5 | V |
| ධනාත්මක බල ධාරාව | 20 | 30 | mA | |
| සෘණ බල වෝල්ටීයතාවය | -15.5 | -15 -අයිස් | -14.5 | V |
| සෘණ බල ධාරාව | 8 | 15 | mA | |
| YI/YQ/XI/XQ ප්රතිදාන වෝල්ටීයතා පරාසය | -14.5 | +14.5 | V | |
| YP/XP ප්රතිදාන වෝල්ටීයතා පරාසය | -13 යනු කුමක්ද? | +13 | V | |
| ඩිදර් විස්තාරය | 1%Vπ | V | ||
| දෘශ්ය | ||||
| ආදාන දෘශ්ය බලය3 | -30 යනු කුමක්ද? | -8 | dBm | |
| ආදාන තරංග ආයාමය | 1100 (1100) යනු කුමක්ද? | 1650 ආර්. | nm | |
1 MER යනු අභ්යන්තර මොඩියුලේටර් වඳවීමේ අනුපාතයයි. සාක්ෂාත් කර ගන්නා ලද වඳවීමේ අනුපාතය සාමාන්යයෙන් මොඩියුලේටර් දත්ත පත්රිකාවේ දක්වා ඇති මොඩියුලේටරයේ වඳවීමේ අනුපාතයයි.
2ඉඩ දෙන්නVπ 180 දී නැඹුරු වෝල්ටීයතාවය දක්වන්න◦ සහVP ක්වාඩ් ලක්ෂ්යවලදී වඩාත්ම ප්රශස්ත නැඹුරු වෝල්ටීයතාවය දක්වන්න.
3තෝරාගත් නැඹුරු ලක්ෂ්යයේ දෘශ්ය බලයට ආදාන දෘශ්ය බලය යොමු නොවන බව කරුණාවෙන් සලකන්න. නැඹුරු වෝල්ටීයතාවය පරාසයක පවතින විට මොඩියුලේටරයට පාලකයට අපනයනය කළ හැකි උපරිම දෘශ්ය බලය එයයි.−Vπ + වෙතVπ .
පරිශීලක අතුරුමුහුණත
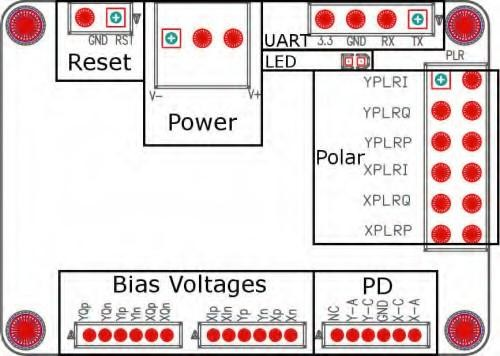
රූපය 5. එකලස් කිරීම
| සමූහය | මෙහෙයුම | පැහැදිලි කිරීම |
| විවේකය | ජම්පරය ඇතුළු කර තත්පර 1 කට පසු පිටතට අදින්න | පාලකය නැවත සකසන්න |
| බලය | පක්ෂග්රාහී පාලකය සඳහා බල ප්රභවය | V- බල සැපයුමේ සෘණ ඉලෙක්ට්රෝඩය සම්බන්ධ කරයි |
| V+ බල සැපයුමේ ධනාත්මක ඉලෙක්ට්රෝඩය සම්බන්ධ කරයි. | ||
| මැද වරාය බිම් ඉලෙක්ට්රෝඩය සමඟ සම්බන්ධ වේ | ||
| යූඒආර්ටී | UART හරහා පාලකය ක්රියාත්මක කරන්න | 3.3: 3.3V යොමු වෝල්ටීයතාවය |
| GND: බිම | ||
| RX: පාලකය ලබා ගැනීම | ||
| TX: පාලක සම්ප්රේෂණය | ||
| LED | නිරන්තරයෙන් ක්රියාත්මකයි | ස්ථාවර තත්ත්වය යටතේ වැඩ කිරීම |
| තත්පර 0.2 කට වරක් සක්රිය-අක්රිය හෝ අක්රිය-අක්රිය | දත්ත සැකසීම සහ පාලන ලක්ෂ්යය සෙවීම | |
| තත්පර 1 කට වරක් සක්රිය හෝ අක්රිය | ආදාන දෘශ්ය බලය ඉතා දුර්වලයි. | |
| තත්පර 3 කට වරක් සක්රිය හෝ අක්රිය | ආදාන දෘශ්ය බලය ඉතා ශක්තිමත් ය. | |
| ධ්රැවීය1 | XPLRI: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ශුන්ය මාදිලිය; ජම්පරයක් සමඟ: උච්ච මාදිලිය |
| XPLRQ: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ශුන්ය මාදිලිය; ජම්පරයක් සමඟ: උච්ච මාදිලිය | |
| XPLRP: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: Q+ මාදිලිය; ජම්පරයක් සමඟ: Q- මාදිලිය | |
| YPLRI: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ශුන්ය මාදිලිය; ජම්පරයක් සමඟ: උච්ච මාදිලිය | |
| YPLRQ: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ශුන්ය මාදිලිය; ජම්පරයක් සමඟ: උච්ච මාදිලිය | |
| YPLRP: ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: Q+ මාදිලිය; ජම්පරයක් සමඟ: Q- මාදිලිය | |
| පක්ෂග්රාහී වෝල්ටීයතා | YQp, YQn: Y ධ්රැවීකරණ Q අත සඳහා නැඹුරුව | YQp: ධනාත්මක පැත්ත; YQn: සෘණ පැත්ත හෝ බිම් |
| YIp, YIn: Y ධ්රැවීකරණය සඳහා නැඹුරුව I අත | YIp: ධනාත්මක පැත්ත; YIn: සෘණ පැත්ත හෝ බිම් | |
| XQp, XQn: X ධ්රැවීකරණ Q අත සඳහා නැඹුරුව | XQp: ධනාත්මක පැත්ත; XQn: සෘණ පැත්ත හෝ බිම් පැත්ත | |
| XIp, XIn: X ධ්රැවීකරණය සඳහා නැඹුරුව I අත | XIp: ධනාත්මක පැත්ත; XIn: සෘණ පැත්ත හෝ බිම් පැත්ත | |
| YPp, YPn: Y ධ්රැවීකරණය P අත සඳහා නැඹුරුව | YPp: ධනාත්මක පැත්ත; YPn: සෘණ පැත්ත හෝ බිම් පැත්ත | |
| XPp, XPn: X ධ්රැවීකරණය P අත සඳහා නැඹුරුව | XPp: ධනාත්මක පැත්ත; XPn: සෘණ පැත්ත හෝ බිම් පැත්ත |
1 ධ්රැවය පද්ධති RF සංඥාව මත රඳා පවතී. පද්ධතිය තුළ RF සංඥාවක් නොමැති විට, ධ්රැවය ධනාත්මක විය යුතුය. RF සංඥාව යම් මට්ටමකට වඩා විස්තාරය වැඩි වූ විට, ධ්රැවය ධනාත්මක සිට සෘණ දක්වා වෙනස් වේ. මෙම අවස්ථාවේදී, ශුන්ය ලක්ෂ්යය සහ උච්ච ලක්ෂ්යය එකිනෙකා සමඟ මාරු වේ. Q+ ලක්ෂ්යය සහ Q- ලක්ෂ්යය ද එකිනෙකා සමඟ මාරු වේ. ධ්රැවීය ස්විචය පරිශීලකයාට වෙනස් කිරීමට හැකියාව ලබා දෙයි
මෙහෙයුම් ලක්ෂ්ය වෙනස් නොකර සෘජුවම ධ්රැවීය.
| සමූහය | මෙහෙයුම | පැහැදිලි කිරීම |
| PD1 | NC: සම්බන්ධ නැත | |
| YA: Y-ධ්රැවීකරණ ප්රභා ඩයෝඩ ඇනෝඩය | YA සහ YC: Y ධ්රැවීකරණ ප්රකාශ ධාරා ප්රතිපෝෂණය | |
| YC: Y-ධ්රැවීකරණ ප්රභා ඩයෝඩ කැතෝඩය | ||
| GND: බිම | ||
| XC: X-ධ්රැවීකරණ ප්රභා ඩයෝඩය කැතෝඩය | XA සහ XC: X ධ්රැවීකරණය ප්රකාශ ධාරා ප්රතිපෝෂණය | |
| XA: X-ධ්රැවීකරණ ප්රභා ඩයෝඩ ඇනෝඩය |
1 පාලක ෆොටෝ ඩයෝඩය භාවිතා කිරීම හෝ මොඩියුලේටර් ෆොටෝ ඩයෝඩය භාවිතා කිරීම අතර එක් තේරීමක් පමණක් තෝරා ගත යුතුය. රසායනාගාර අත්හදා බැලීම් සඳහා පාලක ෆොටෝ ඩයෝඩය භාවිතා කිරීම හේතු දෙකක් නිසා නිර්දේශ කෙරේ. පළමුව, පාලක ෆොටෝ ඩයෝඩය ගුණාංග සහතික කර ඇත. දෙවනුව, ආදාන ආලෝක තීව්රතාවය සකස් කිරීම පහසුය. මොඩියුලේටරයේ අභ්යන්තර ෆොටෝ ඩයෝඩය භාවිතා කරන්නේ නම්, කරුණාකර ෆොටෝ ඩයෝඩයේ ප්රතිදාන ධාරාව ආදාන බලයට දැඩි ලෙස සමානුපාතික වන බවට වග බලා ගන්න.
Rofea Optoelectronics විසින් වාණිජ විද්යුත්-දෘශ්ය මොඩියුලේටර්, අදියර මොඩියුලේටර්, තීව්රතා මොඩියුලේටර්, ෆොටෝඩෙටෙක්ටර්, ලේසර් ආලෝක ප්රභව, DFB ලේසර්, දෘශ්ය ඇම්ප්ලිෆයර්, EDFA, SLD ලේසර්, QPSK මොඩියුලේෂන්, ස්පන්දන ලේසර්, ආලෝක අනාවරකය, සමතුලිත ෆොටෝඩෙටෙක්ටර්, ලේසර් ධාවකය, ෆයිබර් ඔප්ටික් ඇම්ප්ලිෆයර්, දෘශ්ය බල මීටරය, බ්රෝඩ්බෑන්ඩ් ලේසර්, සුසර කළ හැකි ලේසර්, දෘශ්ය අනාවරකය, ලේසර් ඩයෝඩ ධාවකය, ෆයිබර් ඇම්ප්ලිෆයර් වැනි නිෂ්පාදන පෙළක් පිරිනමයි. අපි අභිරුචිකරණය සඳහා බොහෝ විශේෂිත මොඩියුලේටර් සපයන්නෙමු, එනම් ප්රධාන වශයෙන් විශ්ව විද්යාල සහ ආයතනවල භාවිතා වන 1*4 අරා අදියර මොඩියුලේටර්, අතිශය අඩු Vpi සහ අතිශය ඉහළ වඳවීමේ අනුපාත මොඩියුලේටර්.
අපගේ නිෂ්පාදන ඔබට සහ ඔබේ පර්යේෂණයට ප්රයෝජනවත් වනු ඇතැයි අපි බලාපොරොත්තු වෙමු.


