




Ultra High Precision MZM මොඩියුලේටර් පක්ෂග්රාහී පාලකය ස්වයංක්රීය පක්ෂග්රාහී පාලකය


විශේෂාංගය
• Peak/Null/Q+/Q− මත පක්ෂග්රාහී වෝල්ටීයතා පාලනය
• අත්තනෝමතික ලක්ෂ්යයක පක්ෂග්රාහී වෝල්ටීයතා පාලනය
• අතිශය නිරවද්ය පාලනය: ශුන්ය මාදිලියේ 50dB උපරිම වඳවීමේ අනුපාතය;
Q+ සහ Q− මාදිලිවල ±0.5◦ නිරවද්යතාවය
• අඩු ඩිදර් විස්තාරය:
NULL මාදිලියේදී සහ PEAK මාදිලියේදී 0.1% Vπ
Q+ මාදිලියේදී සහ Q− මාදිලියේදී 2% Vπ
• ඉහළ ස්ථායිතාව: සම්පූර්ණයෙන්ම ඩිජිටල් ක්රියාත්මක කිරීම සමඟ
• අඩු පැතිකඩ: 40mm(W) × 30mm(D) × 10mm(H)
• භාවිතා කිරීමට පහසුය: කුඩා ජම්පරයක් සමඟ අතින් ක්රියා කිරීම;
MCU UART2 හරහා නම්යශීලී OEM මෙහෙයුම්
• නැඹුරු වෝල්ටීයතාවය සැපයීම සඳහා වෙනස් ආකාර දෙකක්: a. ස්වයංක්රීය නැඹුරු පාලනය
ආ. පරිශීලක නිර්වචනය කළ නැඹුරු වෝල්ටීයතාවය

අයදුම්පත
• LiNbO3 සහ අනෙකුත් MZ මොඩියුලේටර්
• ඩිජිටල් NRZ, RZ
• ස්පන්දන යෙදුම්
• බ්රිලූයින් විසිරුම් පද්ධතිය සහ අනෙකුත් දෘශ්ය සංවේදක
• CATV සම්ප්රේෂකය
කාර්ය සාධනය
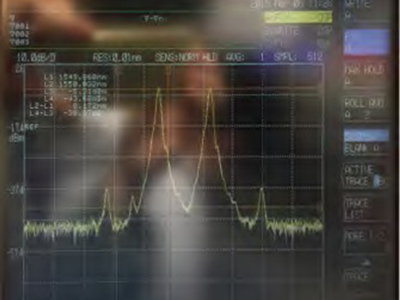
රූපය 1. වාහක මර්දනය
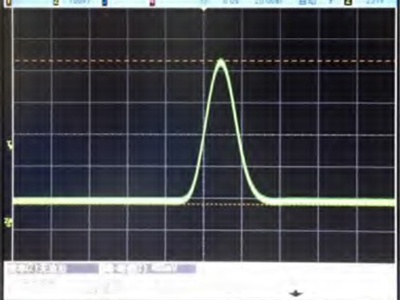
රූපය 2. ස්පන්දන උත්පාදනය

රූපය 3. මොඩියුලේටරයේ උපරිම බලය
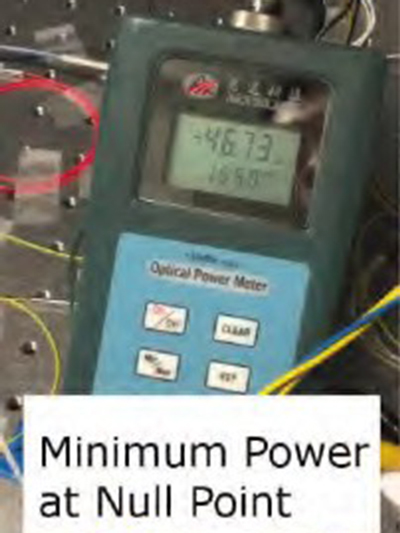
රූපය 4. මොඩියුලේටරයේ අවම බලය
මැක්සිම් DC වඳවීමේ අනුපාතය
මෙම අත්හදා බැලීමේදී, පද්ධතියට RF සංඥා යොදන ලදී. පිරිසිදු DC නිවී යාම මනිනු ලැබ ඇත.
1. රූප සටහන 5 මඟින්, මොඩියුලේටරය උපරිම ලක්ෂ්යයේදී පාලනය කරන විට, මොඩියුලේටර් ප්රතිදානයේ දෘශ්ය බලය පෙන්නුම් කරයි. එය රූප සටහනේ 3.71dBm පෙන්වයි.
2. රූප සටහන 6 හි මොඩියුලේටරය ශුන්ය ලක්ෂ්යයේදී පාලනය කරන විට, මොඩියුලේටරය ප්රතිදානයේ දෘශ්ය බලය පෙන්වයි. එය රූප සටහනේ -46.73dBm පෙන්වයි. සැබෑ අත්හදා බැලීමේදී, අගය -47dBm පමණ වෙනස් වේ; සහ -46.73 යනු ස්ථාවර අගයකි.
3. එබැවින්, මනිනු ලබන ස්ථායී DC වඳවීමේ අනුපාතය 50.4dB වේ.
ඉහළ වඳවීමේ අනුපාතය සඳහා අවශ්යතා
1. පද්ධති මොඩියුලේටරයට ඉහළ වඳවීමේ අනුපාතයක් තිබිය යුතුය. පද්ධති මොඩියුලේටරයේ ලක්ෂණය උපරිම වඳවීමේ අනුපාතය ලබා ගත හැකි ආකාරය තීරණය කරයි.
2. මොඩියුලේටර් ආදාන ආලෝකයේ ධ්රැවීකරණය ගැන සැලකිලිමත් විය යුතුය. මොඩියුලේටර් ධ්රැවීකරණයට සංවේදී වේ. නිසි ධ්රැවීකරණය 10dB ට වැඩි වඳවීමේ අනුපාතය වැඩි දියුණු කළ හැකිය. රසායනාගාර අත්හදා බැලීම් වලදී, සාමාන්යයෙන් ධ්රැවීකරණ පාලකයක් අවශ්ය වේ.
3. නිසි පක්ෂග්රාහී පාලක. අපගේ DC වඳවීමේ අනුපාත අත්හදා බැලීමේදී, 50.4dB වඳවීමේ අනුපාතය ලබාගෙන ඇත. මොඩියුලේටර් නිෂ්පාදනයේ දත්ත පත්රිකාවේ 40dB පමණක් ලැයිස්තුගත කර ඇත. මෙම වැඩිදියුණු කිරීමට හේතුව සමහර මොඩියුලේටර් ඉතා වේගයෙන් ප්ලාවනය වීමයි. වේගවත් ධාවන ප්රතිචාරය සහතික කිරීම සඳහා Rofea R-BC-ANY පක්ෂග්රාහී පාලක සෑම තත්පර 1 කට වරක් පක්ෂග්රාහී වෝල්ටීයතාවය යාවත්කාලීන කරයි.
පිරිවිතර
| පරාමිතිය | අවම | ටයිප් කරන්න | උපරිම | ඒකකය | කොන්දේසි |
| කාර්ය සාධනය පාලනය කරන්න | |||||
| වඳවීමේ අනුපාතය | මාර්තු 1 | 50 | dB | ||
| සීඑස්ඕ2 | −55 යනු කුමක්ද? | −65 | −70 (පළමුව) | dBc | ඩිදර් විස්තාරය: 2%Vπ |
| ස්ථායීකරණ කාලය | 4 | s | ලුහුබැඳීමේ ස්ථාන: ශුන්ය සහ උච්ච | ||
| 10 | ලුහුබැඳීමේ ලක්ෂ්ය: Q+ සහ Q- | ||||
| විදුලි | |||||
| ධනාත්මක බල වෝල්ටීයතාවය | +14.5 | +15 | +15.5 | V | |
| ධනාත්මක බල ධාරාව | 20 | 30 | mA | ||
| සෘණ බල වෝල්ටීයතාවය | -15.5 | -15 -අයිස් | -14.5 | V | |
| සෘණ බල ධාරාව | 2 | 4 | mA | ||
| ප්රතිදාන වෝල්ටීයතා පරාසය | -9.57 ට | +9.85 | V | ||
| ප්රතිදාන වෝල්ටීයතා නිරවද්යතාවය | 346 යි | µV | |||
| ඩිදර් සංඛ්යාතය | 999.95 මිල | 1000 යි | 1000.05 (රු. 1000.05) | Hz | අනුවාදය: 1kHz ඩිතර් සංඥාව |
| ඩිදර් විස්තාරය | 0.1%Vπ | V | ලුහුබැඳීමේ ස්ථාන: ශුන්ය සහ උච්ච | ||
| 2%Vπ | ලුහුබැඳීමේ ලක්ෂ්ය: Q+ සහ Q- | ||||
| දෘශ්ය | |||||
| ආදාන දෘශ්ය බලය3 | -30 යනු කුමක්ද? | -5 | dBm | ||
| ආදාන තරංග ආයාමය | 780 යි | 2000 වසර | nm | ||
1. MER යනු මොඩියුලේටර් වඳවීමේ අනුපාතයයි. සාක්ෂාත් කර ගන්නා ලද වඳවීමේ අනුපාතය සාමාන්යයෙන් මොඩියුලේටර් දත්ත පත්රිකාවේ දක්වා ඇති මොඩියුලේටරයේ වඳවීමේ අනුපාතයයි.
2. CSO යනු සංයුක්ත දෙවන අනුපිළිවෙලයි. CSO නිවැරදිව මැනීම සඳහා, RF සංඥා, මොඩියුලේටර් සහ ග්රාහකවල රේඛීය ගුණාත්මකභාවය සහතික කළ යුතුය. ඊට අමතරව, විවිධ RF සංඛ්යාතවල ක්රියාත්මක වන විට පද්ධති CSO කියවීම් වෙනස් විය හැකිය.
3. තෝරාගත් නැඹුරු ලක්ෂ්යයේදී ආදාන දෘශ්ය බලය දෘශ්ය බලයට අනුරූප නොවන බව කරුණාවෙන් සලකන්න. නැඹුරු වෝල්ටීයතාවය −Vπ සිට +Vπ දක්වා පරාසයක පවතින විට මොඩියුලේටරයට පාලකයට අපනයනය කළ හැකි උපරිම දෘශ්ය බලය එයයි.
පරිශීලක අතුරුමුහුණත
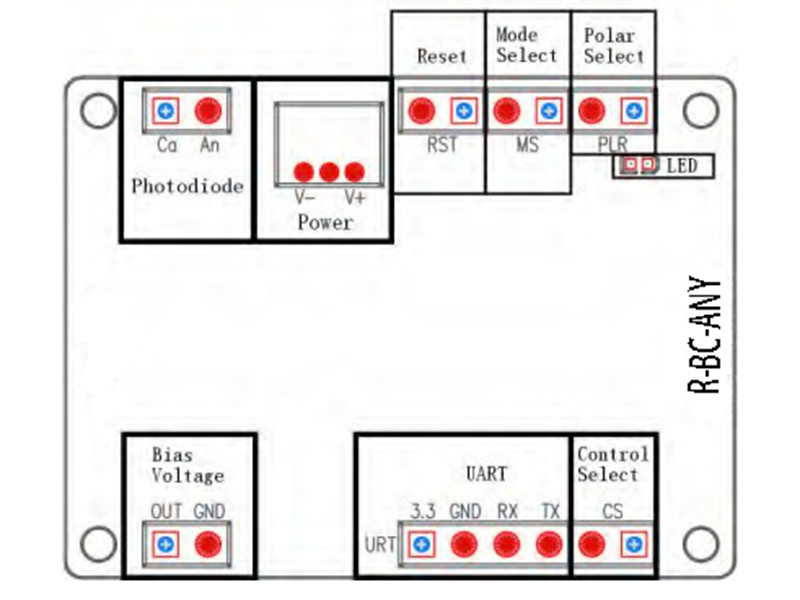
රූපය 5. එකලස් කිරීම
| සමූහය | මෙහෙයුම | පැහැදිලි කිරීම |
| ෆොටෝඩයෝඩය 1 | PD: MZM ෆොටෝ ඩයෝඩයේ කැතෝඩය සම්බන්ධ කරන්න | ප්රභාධාරා ප්රතිපෝෂණ ලබා දෙන්න |
| GND: MZM ෆොටෝ ඩයෝඩයේ ඇනෝඩය සම්බන්ධ කරන්න | ||
| බලය | පක්ෂග්රාහී පාලකය සඳහා බල ප්රභවය | V-: සෘණ ඉලෙක්ට්රෝඩය සම්බන්ධ කරයි |
| V+: ධන ඉලෙක්ට්රෝඩය සම්බන්ධ කරයි | ||
| මැද පරීක්ෂණය: බිම් ඉලෙක්ට්රෝඩය සම්බන්ධ කරයි | ||
| නැවත සකසන්න | ජම්පරය ඇතුළු කර තත්පර 1 කට පසු පිටතට අදින්න | පාලකය නැවත සකසන්න |
| ප්රකාරය තේරීම | ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ශුන්ය මාදිලිය; ජම්පරයක් සමඟ: ක්වාඩ් මාදිලිය |
| ධ්රැවීය තේරීම2 | ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ධනාත්මක ධ්රැවීය; ජම්පරයක් සමඟ: සෘණ ධ්රැවීය |
| පක්ෂග්රාහී වෝල්ටීයතාවය | MZM නැඹුරු වෝල්ටීයතා වරාය සමඟ සම්බන්ධ වන්න | OUT සහ GND මොඩියුලේටරය සඳහා නැඹුරු වෝල්ටීයතා සපයයි. |
| LED | නිරන්තරයෙන් ක්රියාත්මකයි | ස්ථාවර තත්ත්වය යටතේ වැඩ කිරීම |
| තත්පර 0.2 කට වරක් සක්රිය-අක්රිය හෝ අක්රිය-අක්රිය | දත්ත සැකසීම සහ පාලන ලක්ෂ්යය සෙවීම | |
| තත්පර 1 කට වරක් සක්රිය හෝ අක්රිය | ආදාන දෘශ්ය බලය ඉතා දුර්වලයි. | |
| තත්පර 3 කට වරක් සක්රිය හෝ අක්රිය | ආදාන දෘශ්ය බලය ඉතා ශක්තිමත් ය. | |
| යූඒආර්ටී | UART හරහා පාලකය ක්රියාත්මක කරන්න | 3.3: 3.3V යොමු වෝල්ටීයතාවය |
| GND: බිම | ||
| RX: පාලකය ලබා ගැනීම | ||
| TX: පාලක සම්ප්රේෂණය | ||
| පාලන තේරීම | ජම්පරය ඇතුළු කරන්න හෝ පිටතට අදින්න | ජම්පරයක් නැත: ජම්පරයක් පාලනය; ජම්පරයක් සමඟ: UART පාලනය |
1. සමහර MZ මොඩියුලේටර් වල අභ්යන්තර ෆොටෝඩයෝඩ ඇත. පාලක සැකසුම පාලකයේ ෆොටෝඩයෝඩය භාවිතා කිරීම හෝ මොඩියුලේටරයේ අභ්යන්තර ෆොටෝඩයෝඩය භාවිතා කිරීම අතර තෝරා ගත යුතුය. රසායනාගාර අත්හදා බැලීම් සඳහා පාලකයේ ෆොටෝඩයෝඩය භාවිතා කිරීම හේතු දෙකක් නිසා නිර්දේශ කෙරේ. පළමුව, පාලක ෆොටෝඩයෝඩය ගුණාත්මකභාවය සහතික කර ඇත. දෙවනුව, ආදාන ආලෝක අභිප්රාය සකස් කිරීම පහසුය. සටහන: මොඩියුලේටරයේ අභ්යන්තර ෆොටෝඩයෝඩය භාවිතා කරන්නේ නම්, කරුණාකර ෆොටෝඩයෝඩයේ ප්රතිදාන ධාරාව ආදාන බලයට දැඩි ලෙස සමානුපාතික වන බවට වග බලා ගන්න.
2. Null පාලන මාදිලියේ (Mode Select pin මගින් තීරණය කරනු ලැබේ) හෝ Quad+ හි Peak සහ Null අතර පාලන ලක්ෂ්යය මාරු කිරීමට Polar pin භාවිතා කරයි.
සහ Quad- in Quad පාලන මාදිලිය. ධ්රැවීය පින් ජම්පරය ඇතුළු කර නොමැති නම්, පාලන ලක්ෂ්යය Null මාදිලියේ Null හෝ Quad මාදිලියේ Quad+ වේ. RF පද්ධතියේ විස්තාරය ද පාලන ලක්ෂ්යයට බලපානු ඇත. RF සංඥාවක් නොමැති විට හෝ RF සංඥා විස්තාරය කුඩා වූ විට, MS සහ PLR ජම්පරය විසින් තෝරාගත් පරිදි නිවැරදි ලක්ෂ්යයට වැඩ ලක්ෂ්යය අගුළු දැමීමට පාලකයට හැකි වේ. RF සංඥා විස්තාරය යම් සීමාවක් ඉක්මවා ගිය විට, පද්ධතියේ ධ්රැවය වෙනස් වනු ඇත, මෙම අවස්ථාවේදී, PLR ශීර්ෂය ප්රතිවිරුද්ධ තත්වයේ තිබිය යුතුය, එනම් ජම්පරය එසේ නොවේ නම් එය ඇතුළු කළ යුතුය, නැතහොත් එය ඇතුළු කළහොත් එය පිටතට ඇද දැමිය යුතුය.
සාමාන්ය යෙදුම
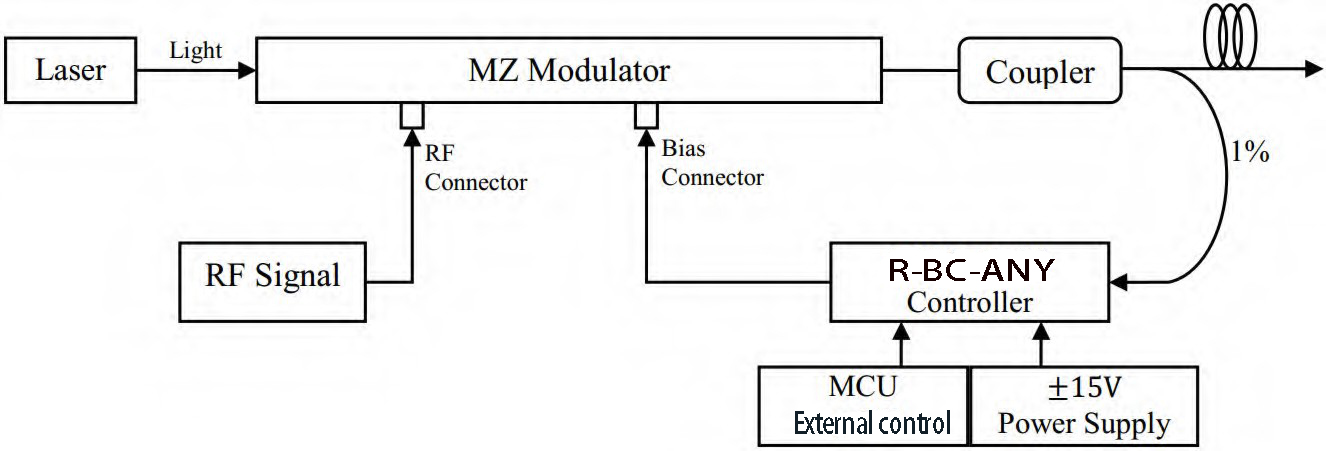
පාලකය භාවිතා කිරීම පහසුය.
පියවර 1. කප්ලර් එකේ 1% ක පෝට් එකක් පාලකයේ ෆොටෝඩයෝඩයට සම්බන්ධ කරන්න.
පියවර 2. පාලකයේ නැඹුරු වෝල්ටීයතා ප්රතිදානය (SMA හෝ 2.54mm 2-pin ශීර්ෂය හරහා) මොඩියුලේටරයේ නැඹුරු තොටට සම්බන්ධ කරන්න.
පියවර 3. +15V සහ -15V DC වෝල්ටීයතාවයන් සහිත පාලකය සපයන්න.
පියවර 4. පාලකය නැවත සකසන්න, එවිට එය ක්රියා කිරීමට පටන් ගනී.
සටහන: පාලකය නැවත සැකසීමට පෙර මුළු පද්ධතියේම RF සංඥාව ක්රියාත්මක බව සහතික කර ගන්න.
Rofea Optoelectronics විසින් වාණිජ විද්යුත්-දෘශ්ය මොඩියුලේටර්, අදියර මොඩියුලේටර්, තීව්රතා මොඩියුලේටර්, ෆොටෝඩෙටෙක්ටර්, ලේසර් ආලෝක ප්රභව, DFB ලේසර්, දෘශ්ය ඇම්ප්ලිෆයර්, EDFA, SLD ලේසර්, QPSK මොඩියුලේෂන්, ස්පන්දන ලේසර්, ආලෝක අනාවරකය, සමතුලිත ෆොටෝඩෙටෙක්ටර්, ලේසර් ධාවකය, ෆයිබර් ඔප්ටික් ඇම්ප්ලිෆයර්, දෘශ්ය බල මීටරය, බ්රෝඩ්බෑන්ඩ් ලේසර්, සුසර කළ හැකි ලේසර්, දෘශ්ය අනාවරකය, ලේසර් ඩයෝඩ ධාවකය, ෆයිබර් ඇම්ප්ලිෆයර් වැනි නිෂ්පාදන පෙළක් පිරිනමයි. අපි අභිරුචිකරණය සඳහා බොහෝ විශේෂිත මොඩියුලේටර් සපයන්නෙමු, එනම් ප්රධාන වශයෙන් විශ්ව විද්යාල සහ ආයතනවල භාවිතා වන 1*4 අරා අදියර මොඩියුලේටර්, අතිශය අඩු Vpi සහ අතිශය ඉහළ වඳවීමේ අනුපාත මොඩියුලේටර්.
අපගේ නිෂ්පාදන ඔබට සහ ඔබේ පර්යේෂණයට ප්රයෝජනවත් වනු ඇතැයි අපි බලාපොරොත්තු වෙමු.


